

Unterschied zwischen absoluten und inkrementellen Encodern

- 3192
- 52
- Fr. Fine Zschunke
Der Nachweis von Winkel und linearer Bewegung ist eine Schlüsselfunktion bei der Steuerung der Maschinen in der Elektronikfabrik. Die Mikrocomputer in diesen Maschinen benötigen häufig Informationen über die Position, Rotationsrichtung und Drehzahl einer Schacht oder Achse, die in digitale Form umgewandelt werden muss. Optische Encoder sind die elektro-mechanischen Geräte, mit denen entweder Winkel- oder lineare Positionen gemessen werden. Diejenigen, die für den Winkelnachweis verwendet werden. Diese werden zunehmend für eine Vielzahl von Arbeitsplätzen in der Verbraucher- und Industrieausrüstung verwendet. Rotary -Encoder oder Wellencodierer können grundsätzlich absolut oder inkrementell sein. Ein absoluter Encoder liefert Positionsinformationen, wenn die Leistung verloren geht, während ein inkrementeller Encoder verwendet wird. Beide können sowohl mit eckigen als auch mit linearen Verschiebungen verwendet werden, aber sie arbeiten unterschiedlich. Schauen wir uns einen detaillierten Blick darauf an, wie sie sich voneinander unterscheiden.
Was ist ein absoluter Encoder?
Ein absoluter Encoder hat für jede Wellenposition einen eindeutigen Code, der die absolute Position des Encoders darstellt. Es liefert direkt die digitale Ausgabe, die die absolute Verschiebung darstellt. Der Wert der tatsächlichen Position wird sofort gemessen, sobald das System eingeschaltet ist. Somit benötigt ein absoluter Encoder keinen Zähler, da der gemessene Wert direkt aus dem Abschlussmuster abgeleitet wird. Es liefert die digitale Ausgabe, die der Position direkt entspricht. Jede Bitposition wird getrennt durch ein dediziertes LED -Paar codiert. Jeder Code ist eine absolute Winkelposition der Schacht in seiner Rotation. Die Scheibe eines absoluten Encoders verwendet einen grauen Code, in dem sich jeweils ein Bit ändert, wodurch Encoder -Kommunikationsfehler reduziert werden. Sie können in Einzel- und Multi-Turn-Encoder unterteilt werden.
Was ist ein inkrementeller Encoder?
Ein inkrementeller Encoder ist ein elektromechanisches Gerät, das die Winkelposition der Welle in digitale oder Impulssignale umwandelt. Es erzeugt eine bestimmte Anzahl von Impulsen pro Revolution und liefert einen Impuls für jedes Inkrement, das der Revolution entspricht. Es kann die Änderung der Position messen, nicht die absolute Position. Daher kann es die Position im Verhältnis zu einer bekannten Referenz daher nicht angeben. Die Anzahl der erzeugten Impulse ist proportional zur Winkelposition der Welle. Inkrementelle Encoder werden in Anwendungen verwendet, bei denen eine Geschwindigkeit oder eine Geschwindigkeits- und Richtungsinformationen erforderlich sind. Jedes Mal, wenn das Gerät eingeschaltet ist oder zurückgesetzt wird, wird es von Null gezählt und erzeugt jedes Mal ein Ausgangssignal, wenn sich die Welle bewegt. Die Arten eines inkrementellen Encoders sind möglicherweise weiter in Quadratur -Encoder und Tachometer unterteilt.
Unterschied zwischen absoluten und inkrementellen Encodern
Grundlagen von absolutem vs. Inkrementelle Encoder
- Beide sind elektromechanische Geräte, mit denen entweder Winkel- oder lineare Positionen der Welle gemessen und in digitale oder Impulssignale umgewandelt werden. Ein absoluter Encoder hat für jede Wellenposition einen eindeutigen Code, der die absolute Position des Encoders darstellt, während ein inkrementeller Encoder jedes Mal ein Ausgangssignal erzeugt Welle. Ein inkrementeller Encoder kann die Änderung der Position messen, nicht die absolute Position.
Betriebsprinzip des Absoluten vs. Inkrementelle Encoder
- Ein absoluter Encoder besteht aus einer binären codierten Scheibe, die auf der Welle montiert ist, so dass es sich mit der Welle dreht. Dank einer Reihe von Ausgangskanälen wird jede Welle Winkelposition durch ihren eigenen eindeutigen Code beschrieben. Die Anzahl der Kanäle steigt, wenn die erforderliche Auflösung zunimmt. Im Gegensatz zu einem inkrementellen Encoder ist es kein Zählgerät, das die Positionsinformationen nicht verliert, wenn die Leistung verloren geht. Ein inkrementeller Encoder hingegen liefert ein Ausgangssignal für ein gegebenes Inkrement der Winkelposition der Welle, die durch Zählen der Ausgangsimpulse relativ zu einem Referenzpunkt bestimmt wird.
Kosteneffizienz
- Die Codematrix der Encoder -Festplatte ist komplexer und da mehr Lichtsensoren benötigt werden, kostet ein absoluter Encoder in der Regel doppelt so viel wie die inkrementellen Encoder. Die Auflösung ist durch die Anzahl der Tracks auf der Encoder -Festplatte begrenzt, sodass es teurer wird, feinere Auflösungen zu erhalten, ohne mehr Spuren hinzuzufügen. Inkrementelle Encoder sind im Gegenteil weniger komplex als ihre absoluten Gegenstücke und somit typischerweise günstiger.
Stabilität
- Absolute Encoder können eine bessere Leistung, genaue Ergebnisse und niedrigere Gesamtkosten bieten. Dank seiner Fähigkeit, absolute Winkellesungen bereitzustellen, auch wenn eine Lesung übersehen wird, wird dies die nächste Lesung nicht beeinflussen. Eine bestimmte Lesung hängt nicht von der Genauigkeit einer früheren Lesung ab. Ein inkrementeller Encoder hingegen muss während des gesamten Betriebs des Geräts eingeschaltet werden. Jedes Mal, wenn die Leistung verloren geht, muss die Lesung neu initialisiert werden oder das System zeigt einen Fehler an. Dies verlangsamt die Systemleistung. Absolute Encoder verlieren keine Positionsinformationen im Falle eines Stromausfalls.
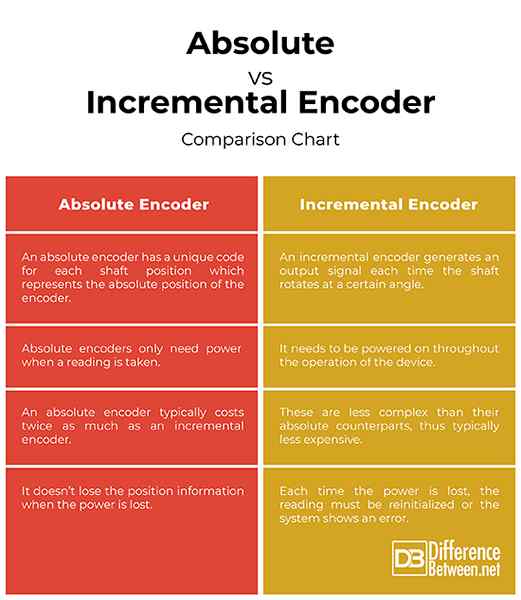
Absolut vs. Inkrementeller Encoder: Vergleichstabelle
Zusammenfassung von Absolute vs. Inkrementelle Encoder
Kurz gesagt, ein inkrementeller Encoder muss während des gesamten Betriebs des Geräts betrieben werden. Im Falle eines Stromausfalls muss die Lesung neu initialisiert werden oder das System führt einen Fehler ein. Ein absoluter Encoder muss im Gegenteil nur dann Macht benötigen, wenn eine Lektüre genommen wird. Dank seiner Fähigkeit, absolute Winkellesungen bereitzustellen, ist eine bestimmte Lesart unabhängig von der Genauigkeit einer früheren Lesung. Die Codematrix der Festplatte in einem absoluten Encoder ist jedoch komplexer und kostet daher in der Regel doppelt so viel wie ein inkrementeller Encoder, was andererseits weniger komplex ist.